
Abstract
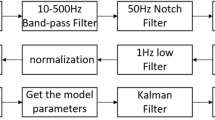
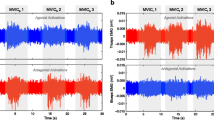
A robot-assisted bimanual shoulder flexion rehabilitation system using surface electromyography (sEMG) for post-stroke hemiplegic patients is presented. Impedance compensation of the actuators using a disturbance observer (DOB) was applied for back-drivable operation. The sEMG signal processing was utilized to obtain a desired assistive torque. Four modes of motion (passive, mirror image, shared, and voluntary) were suggested as an appropriate training platform for the various patient statuses and levels of individual recovery. Then the performance of the impedance compensation and assistive operation of the system was verified by experiments with healthy participants. The DOB decreased resistive torque by 99% compared to the open loop performance. The shoulder torque was estimated using the sEMG and linear regression (CORR = 0.960 ± 0.011, NRMSE = 7.31 ± 1.32%) and an artificial neural network (ANN) (CORR = 0.986 ± 0.005, NRMSE = 6.96 ± 1.08%) methods for generating system input based on the user’s motion intention. Every mode had less than a 6% NRMSE motion error in experiments without discomforts or resistance during shoulder flexion motion of mirror the arm.
Article PDF
Similar content being viewed by others

References
Mackay, J. and Mensah, G., “The atlas of heart disease and stroke,” World Health Organization, 2004.
Lum, P. S., Burgar, C. G., and Shor, P. C., “Evidence for Improved Muscle Activation Patterns After Retraining of Reaching Movements with the MIME Robotic System in Subjects with Post-Stroke Hemiparesis,” IEEE Trans. Neural Syst. Rehabil. Eng., Vol. 12, No. 2, pp. 186–194, 2004.
Lum, P. S., Burgar, C. G., Loos, M. V., Shor, P. C., Majmundar, M., and Yap, R., “MIME robotic device for upper-limb neurorehabilitation in subacute stroke subjects: a follow-up study,” J. Rehabil. Res. Dev., Vol. 43, No. 5, pp. 631–642, 2006.
Hesse, S., Schulte-Tigges, G., Konrad, M., Bardeleben, A., and Werner, C., “Robot-assisted arm trainer for the passive and active practice of bilateral forearm and wrist movements in hemiparetic subjects,” Arch. Phys. Med. Rehabil., Vol. 84, No. 6, pp. 915–920, 2003.
Stein, J., Harvey, R. L., Macko, R. F., Winstein, C. J., and Zorowitz, R. D., “Stroke recovery & rehabilitation,” Demos Medical, 2009.
Donatelli, R. A., “Physical therapy of the shoulder, 4th ed.,” Churchill Livingstone, 2004.
Krebs, H. I., Hogan, N., Aisen, M. L., and Volpe, B. T., “Robotaided neuro-rehabilitation,” IEEE Trans. Rehabil. Eng., Vol. 6, No. 1, pp. 75–87, 1998.
Lum, P. S., Burgar, C. G., Shor, P. C., Majmundar, M., and Van der Loos, M., “Robot-Assisted Movement Training Compared With Conventional Therapy Techniques for the Rehabilitation of Upper-Limb Motor Function After Stroke,” Arch. Phys. Med. Rehabil., Vol. 83, pp. 952–959, 2002.
Fasoli, S. D., Krebs, H. I., Stein, J., Frontera, W. R., and Hogan, N., “Effects of robotic therapy on motor impairment and recovery in chronic stroke,” Arch. Phys. Med. Rehabil., Vol. 84, No. 4, pp. 477–482, 2003.
Dipietro, L., Ferraro, M., Palazzolo, J. J., Krebs, H. I., Volpe, B. T., and Hogan, N., “Customized interactive robotic treatment for stroke: EMG-triggered therapy,” IEEE Trans. Neural Syst. Rehabil. Eng., Vol. 13, No. 3, pp. 325–334, 2005.
Korean Agency for Technology and Standard (KATS), “5th Anthropometric Dimensional Data Report for Korean,” 2004.
Kong, K., Bae, J., and Tomizuka, M., “Control of rotary series elastic actuator for ideal force mode actuation in human robot interaction applications,” IEEE/ASME Trans. Mechatronics, Vol. 14, No. 1, pp. 105–118, 2009.
Kong, K., Moon, H., Hwang, B., Jeon, D., and Tomizuka, M., “Impedance Compensation of SUBAR for Back-Drivable Force Mode Actuation,” IEEE Trans. Robot., Vol. 25, No. 3, pp. 512–521, 2009.
Pan, Y.-R., Shih, Y.-T., Horng, R.-H., and Lee, A.-C., “Advanced Parameter Identification for a Linear-Motor-Driven Motion System Using Disturbance Observer,” Int. J. Precis. Eng. Manuf., Vol. 10, No. 4, pp. 35–47, 2009.
Ohnishi, K., “Robust motion control by disturbance observer,” J. Robot. Mechatronics, Vol. 8, No. 3, pp. 218–225, 1996.
Winter, D., “Biomechanics and motor control of human movement,” Wiley-Interscience, 1990.
Nian, X.-H., Yang, Y., and Huang, L., “Matrix Approximation with Constraints of Matrix Inequalities and Applications in Robust Control,” Acta Automatica Sinica, Vol. 31, No. 3, pp. 352–358, 2005.
Cutter, N. C. and Kevorkian, C. G., “Handbook of manual muscle testing,” McGraw-Hill, 1999.
Park, J., Kim, K., and Hong, D., “Haptic-based resistance training machine and its application to biceps exercises,” Int. J. Precis. Eng. Manuf., Vol. 12, No. 1, pp. 21–30, 2011.
Viitasalo, J. and Komi, P., “Signal characteristics of EMG during fatigue,” Eur. J. Appl. Physiol. Occup. Physiol., Vol. 37, No. 2, pp. 111–121, 1977.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Park, K., Lee, D.J., Heo, P. et al. Development of mirror image motion system with sEMG for shoulder rehabilitation of post-stroke hemiplegic patients. Int. J. Precis. Eng. Manuf. 13, 1473–1479 (2012). https://doi.org/10.1007/s12541-012-0194-0
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12541-012-0194-0